

EtherCAT同步模式和CiA402定位控制模式
EtherCAT同步模式
EtherCAT 配置為通過主站的命令控制每個連接的從站。
來自主站的命令基本上是通過稱為 PDO(過程數據對象)通信的通信循環發送的,但同步模式是指每個從站響應主站命令進行操作的時序。去做。
選擇產品時,需要確認目標產品支持所需的模式和周期時間。
自由奔跑
在此模式下,每個從站按照自己的處理週期運行,而不與主站的通信同步。
因此,如果同時向多個從機發出命令,則操作時序將不相同。
(可能不會改變外觀)
雖然缺乏對通信週期的實時響應,但通常用於在初始調整階段檢查操作。
短信同步
SM 代表同步管理器,是處理從機內部通信幀數據的內部模塊。
SM同步是一種與從主站接收通信幀同步操作的模式。
每次來自主站的通信幀經過從站時,都會產生傳輸延遲,因此多個從站之間的操作時序會有所不同。
(你不知道它是什麼樣子的)
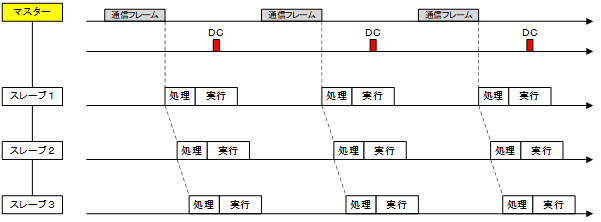
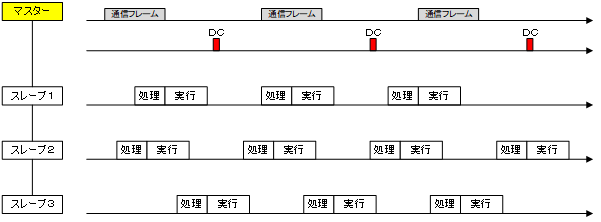
直流同步
DC 代表分佈式時鐘,是 EtherCAT 同步操作的一個特徵。
該模式通過測量各從機來自主機的通信幀傳輸延遲時間,共享系統時間,同步時序
,實現多個從機之間精確的同步處理。
CiA402的定位控制方式
使用 EtherCAT 的運動控制通常使用 CiA402 驅動配置文件標準。
除了定位控制外,CiA402還定義了速度控制、扭矩控制等模式。
另外,根據產品的不同,除了標准定義的標準規格外,還提供製造商自己的規格和設置。
PP(輪廓位置)模式
主機發送速度、加速度、減速度、目標位置等數據,從機根據這些數據進行定位操作。
從機生成軌跡。
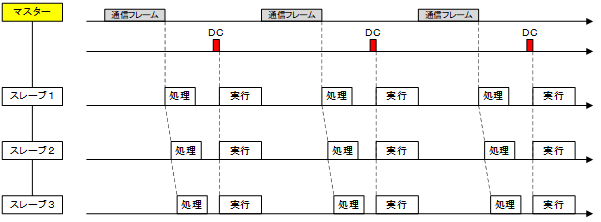
CSP(循環同步位置)模式
在CSP模式下,主機生成軌跡。
主機在每個週期通過PDO通訊向從機指令目標運行位置,從機按照指令進行運行。
上述直流同步可實現多個從站的循環插補操作,這是用於控制多軸機器人的EtherCAT運動控制的特色功能之一。
EC-AD系列
配備步進電機驅動器的EC-AD系列配備了我們成熟的脈衝控制LSI PCL系列。
該產品推薦用於不需要插補或CSP控制的EtherCAT多軸控制應用,因為PP模式可以使用直流同步和短週期時間(250us)。