


EtherCAT通訊類型
1. PDO通信和Mailbox通信
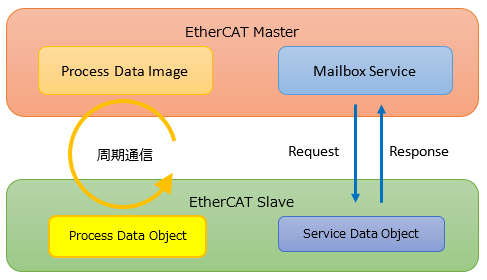
EtherCAT 具有 PDO(過程數據對象)通信(循環通信)和郵箱通信(異步通信)。
郵箱通信協議 包括
基於 EtherCAT 的 CAN 應用層 (CoE)、基於 EtherCAT 的以太網 (EoE)、基於 EtherCAT 的文件訪問 (FoE)、基於EtherCAT 的伺服驅動器配置文件(SoE) 以及基於EtherCAT 的供應商特定協議(VoE)。
2. PDO通信
通常,需要嚴格同步的對像被分配給 PDO,並使用 PDO 通信在主站和從站之間定期進行通信。
該週期取決於主站和從站的規格。
我們的 EC-AD 系列的最小 PDO 週期為 250μs。
PDO(CoE協議)分配如下表所示。
適用於 EC-AD1442A1
| 接收 (Rx) PDO 映射 | 發送 (TX) PDO 映射 |
|---|---|
| 控製字 | 狀態字 |
| 目標位置 | 持倉實際價值 |
| 輪廓速度 | 錯誤代碼 |
| 輪廓加速 | 操作模式顯示 |
| 輪廓減速 | |
| 比較數據 | |
| 運作模式 |
EC-AD系列對象除比較數據外,均基於CiA402驅動配置文件,可以按照標準控製配置文件位置模式(PP)和歸位模式(HM)。
比較數據用於比較器功能(我們產品的獨特功能)。比較器功能是比較數據和比較計數器的功能。
比較計數器可以選擇指令位置、機械位置、偏差、當前速度。
比較結果從輸出端輸出,無需通訊即可與其他設備同步。
3. Mailbox通信
另一方面,在Mailbox通信中,CoE通信可以隨時訪問從站中的每個對象。
以前使用每個製造商特定的實用軟件或外部交換機設置的驅動程序設置現在可以使用來自主站的 CoE 通信進行設置。
此外,根據從站規格,可以通過 CoE 通信獲取詳細的驅動器信息(詳細的報警信息/歷史記錄、當前值、溫度、操作時間等)。
我們的EC-AD系列支持CoE和FoE,通過CoE通信,您可以設置和配置諸如微步分割數、輸出電流值、電流下降延遲時間、加速時輸出電流、電機停止時輸出電流等設置。停了。你可以檢查一下。
此外,還可以通過 FoE 通信更新固件。
EC-AD系列
配備步進電機驅動器的EC-AD系列配備了我們成熟的脈衝控制LSI PCL系列。
該產品推薦用於不需要插補或CSP控制的EtherCAT多軸控制應用,因為PP模式可以使用直流同步和短週期時間(250us)。