| 設備ID | 1個 |
|---|---|
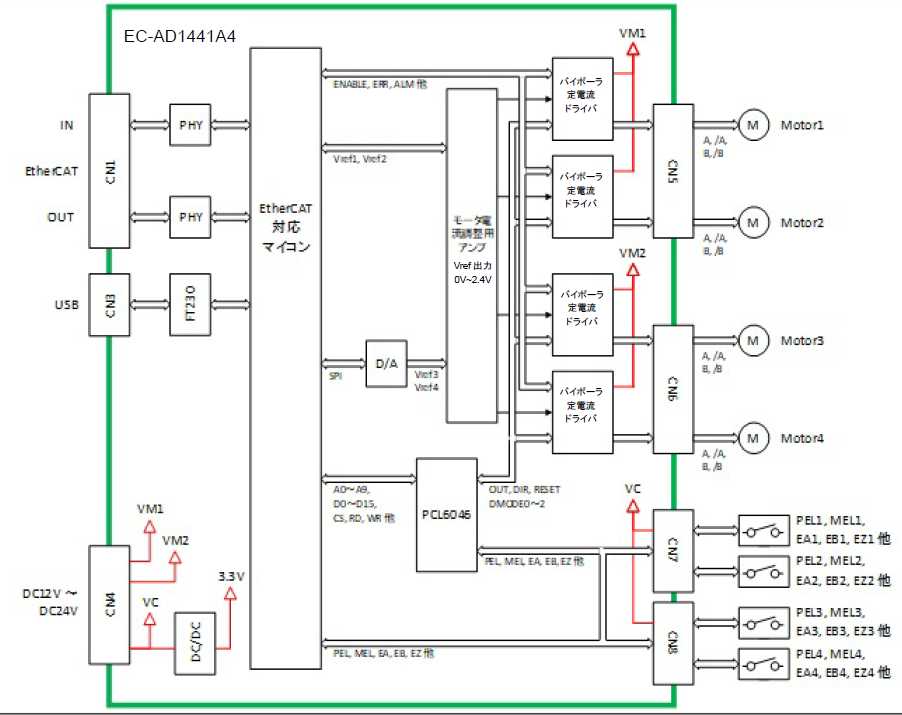
| 通訊協議 | EtherCAT PDO(過程數據對象) SDO(服務數據對象) |
| 支持通訊協議 | CoE(基於 EtherCAT 的 CANopen 應用協議) FoE(基於 EtherCAT 的文件訪問) |
| 控製配置文件 | CiA402 驅動配置文件 |
| 動作模式 | PP(輪廓位置)模式 HM(歸位)模式 |
| 同步模式 | DC(Distributed Clock)同期250us以上/ FreeRun |
| 控制軸數 | 4軸 |
|---|---|
| 運動控制核心 | NPM脈衝控制LSI PCL6046(參考時鐘:24.576MHz) |
| 適用電機 | 2相雙極步進電機 |
|---|---|
| 制御方式 | 雙極性恆流驅動 |
| 勵磁方式 | 微步控制(1/1、1/2、1/4、1/8、1/16、1/32) |
| 出力電流 | 0.1A~3.0A/相(0.1A單位) |
| 電機驅動電流控制 | AGC(主動增益控制)控制* 加減速時電流增加功能(最大1.5倍設定電流(最大3.0A)) |
| 異常檢測 | 過流、過熱、電機掉電 |
| 驅動參數 | 通過SDO(服務數據對象)通信設置 |
* AGC是東芝獨創的步進電機驅動技術。
| 輸入信號 | 緊急停止/各軸:±終點限位/原點/編碼器A相、B相、Z相 |
|---|---|
| 出力信號 | 報警/各軸:比較器 |
| 電源電壓 | DC+12V~+24V±10%(控制電源/電機驅動電源,單獨輸入) |
|---|---|
| 供給電流 | 控制功率:0.5A / 電機驅動功率:6A/每2軸 |
| 符合標準 | RoHS指令 2011/65/EU (2015/863/EU追加4物質含む) |
| 使用温度範囲 | 0 至 45°C(無冷凝) |
| 保存温度範囲 | -10 至 60°C(無冷凝) |
| 固件軟件 | 可使用 FoE(基於 EtherCAT 的文件訪問)協議重寫 |
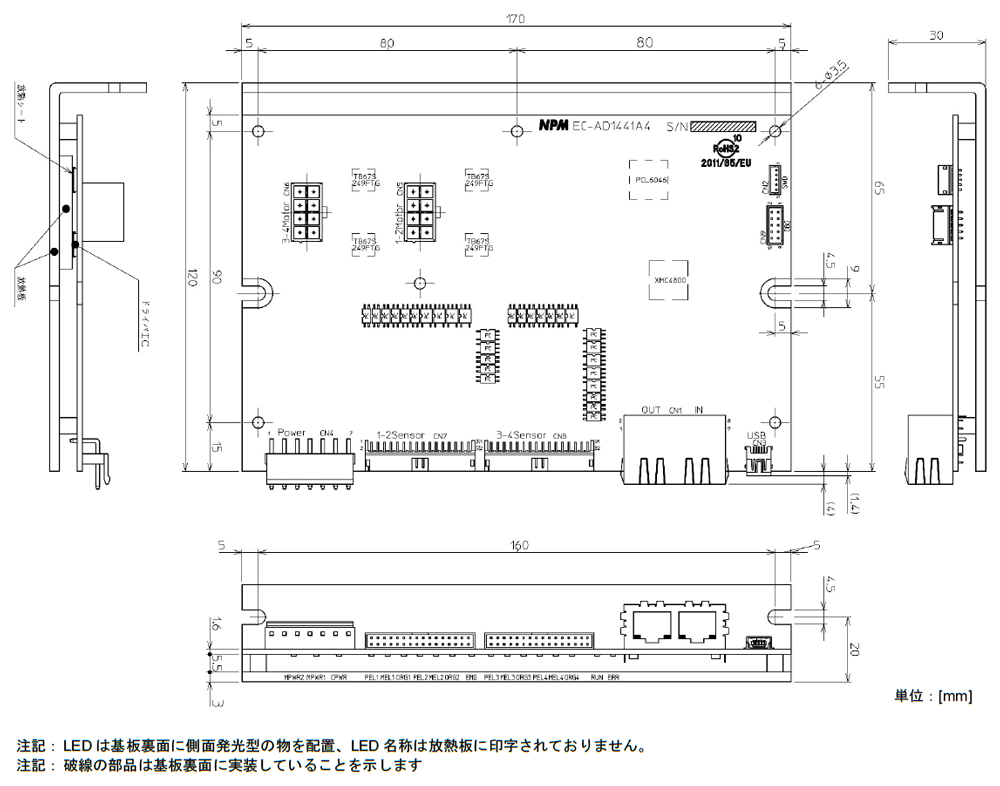
| 外形尺寸 | 170mm(寬)×120mm(深)×30mm(高) |
| 冷卻方式 | 自然冷卻(散熱片溫度超過70℃需強製冷卻) |
*Click the picture to zoom in.
*Click the picture to zoom in.
| 品名 | 零件號 | 類型名稱 | 外部的 |
| 電源線束 | 2240-001106 | ECD-U4CA-PW1 |  |
| 電機連接線束 | 2240-001110 | ECD-B4CA-MT1 |  |
| 輸入/輸出信號連接線束 | 2240-001108 | ECD-U4CA-IO1 |  |