| Performance | Units | 1860A | 1860B |
| Continuous Stall Torque* | Nm | 64.9 | 62.2 |
| Continuous Current* | Arms | 3.04 | 6.41 |
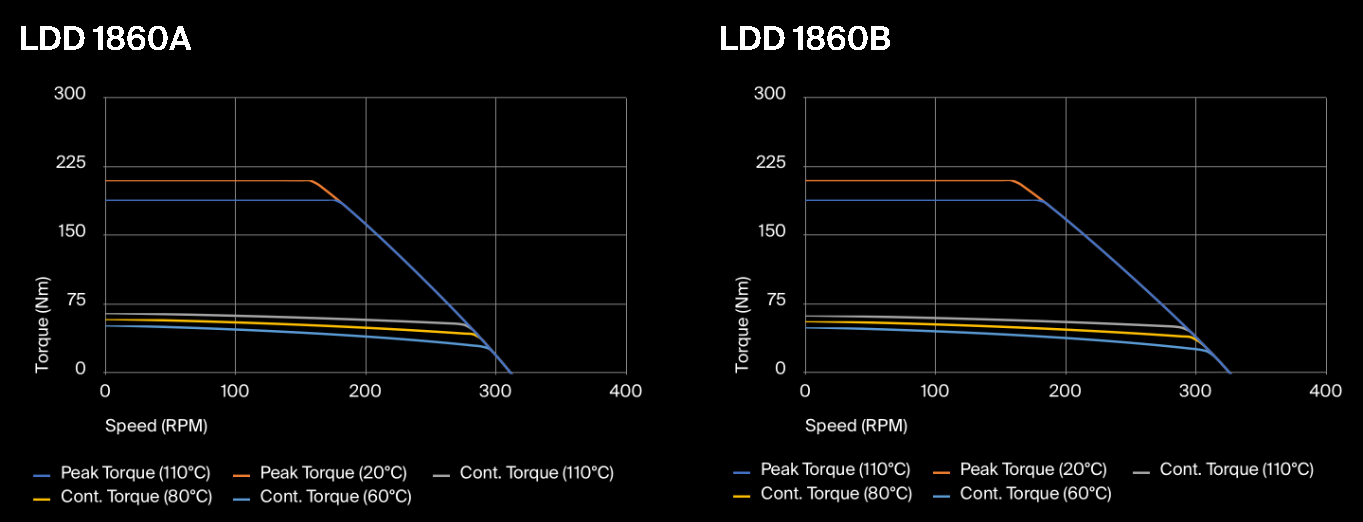
| Peak Torque @ 20°C | Nm | 210 | 210 |
| Peak Current | Arms | 9.6 | 21.5 |
| Rated Power* | W | 1,516 | 1,495 |
| Rated Speed at Rated Power | RPM | 259 | 271 |
| Rated Torque at Rated Power | Nm | 53.7 | 50.6 |
| No-Load Speed | RPM | 307 | 320 |
| Electrical | Units | 1860A | 1860B |
| Design Voltage | VAC | 480 | 230 |
| Ke at 20°C (± 10 %) | Vrms/kRPM | 1,530 | 700 |
| Kt loaded at 110°C up to Icont | Nm/Arms | 21.30 | 9.75 |
| Km at 20°C | Nm/√(W) | 4.78 | 4.59 |
| Km at 110°C | Nm/√(W) | 3.46 | 3.31 |
| Resistance line-to-line at 20°C (± 10 %) | Ω | 18.70 | 4.24 |
| Inductance line-to-line at 20°C (± 10 %) | mH | 46.5 | 10.4 |
| Thermal | Units | 1860A | 1860B |
| Aluminum Heat Sink Dimensions | mm | 400 x 400 x 12.7 | 400 x 400 x 12.7 |
| Storage Temperature | °C | 0 to 80 | 0 to 80 |
| Operating Ambient Temperature | °C | 0 to 40 (no freezing) | 0 to 40 (no freezing) |
| Maximum Winding Temperature | °C | 110 | 110 |
| Physical | Units | 1860A | 1860B |
| Outer Diameter | mm | 180 | 180 |
| Length | mm | 182 | 182 |
| Rotor Inertia (with Brake) | kg·m2 | 0.0161 (0.0173) |
0.0161 (0.0173) |
| Total Mass (with Brake)** | kg | 14.5 (15.4) |
14.5 (15.4) |
| Number of Poles | 44 | 44 |
| Mechanical | Units | 1860A | 1860B |
| Allowable Radial Load | N | ± 1650 | ± 1650 |
| Allowable Thrust Load | N | +250 / -800 | +250 / -800 |
| Allowable Moment Load | Nm | ± 200 | ± 200 |
| Operating Noise | dBa | 65 | 65 |
| Protection Class | IP67 | IP67 |
| Temperature Sensors | 1830 (All Models) |
| Sensor | PT1000 |
| Encoder Protocols (All Models) | Model Code | Resolution (CPR) | Connector Interface |
| BiSS-C® | -B1 | 2,097,152 (21 bit) | M12 |
| EnDat 2.2 | -E1 | 524,288 (19 bit) | M12 |
| HIPERFACE® | -H1 | 128 (analog***) | M12 |
| HIPERFACE DSL® | -D1 | 1,048,576 (20 bit) | M23 one cable technology (OCT) |
| HIPERFACE DSL® with Rockwell Automation Digital Nameplate**** | -R1 | 1,048,576 (20 bit) | Rockwell Automation-compatible SpeedTec DIN M23 |
| All models are single-turn absolute encoders |
| Brake (Optional) | Units | 1860 (All Models) |
| Brake Holding Torque | Nm | 18 |
| Brake Voltage | VDC | 24 |
*Assumes a 90°C rise from an ambient temperature of 20°C with motor mounted to listed aluminum heatsink or equivalent.
**Mass varies slightly by encoder type. Specifications assume configuration with largest mass.
***HIPERFACE® uses a serial interface to read absolute position before switching to sin/cos analog signals for incremental position feedback. Analog signals are interpolated at the drive and therefore, digital resolution is dependent on the drive.
****Refer to “Commissioning Rockwell Automation Drives with LDD 1800 Motors” for more information
Specifications are rated assuming a 20C ambient temperature. Increasing the ambient temperature derates the motor performance.
All electrical and performance specifications have +/- 10% tolerance. Specifications are preliminary and subject to change.