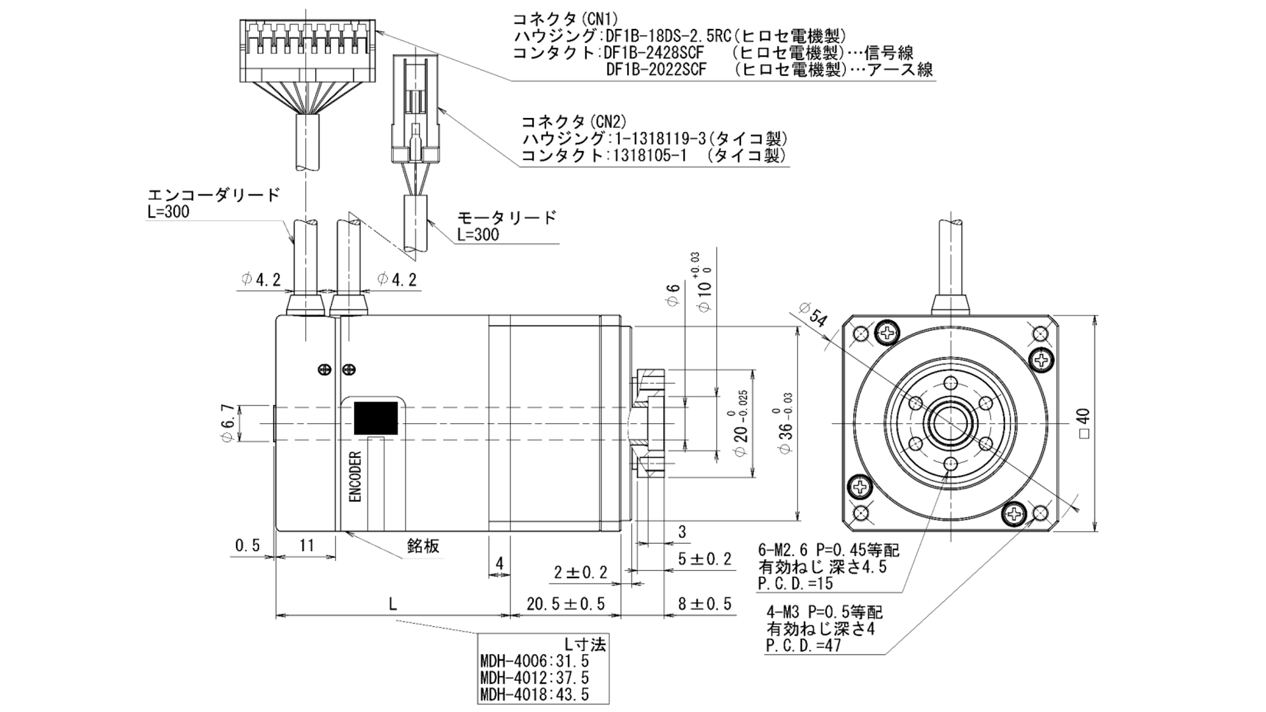
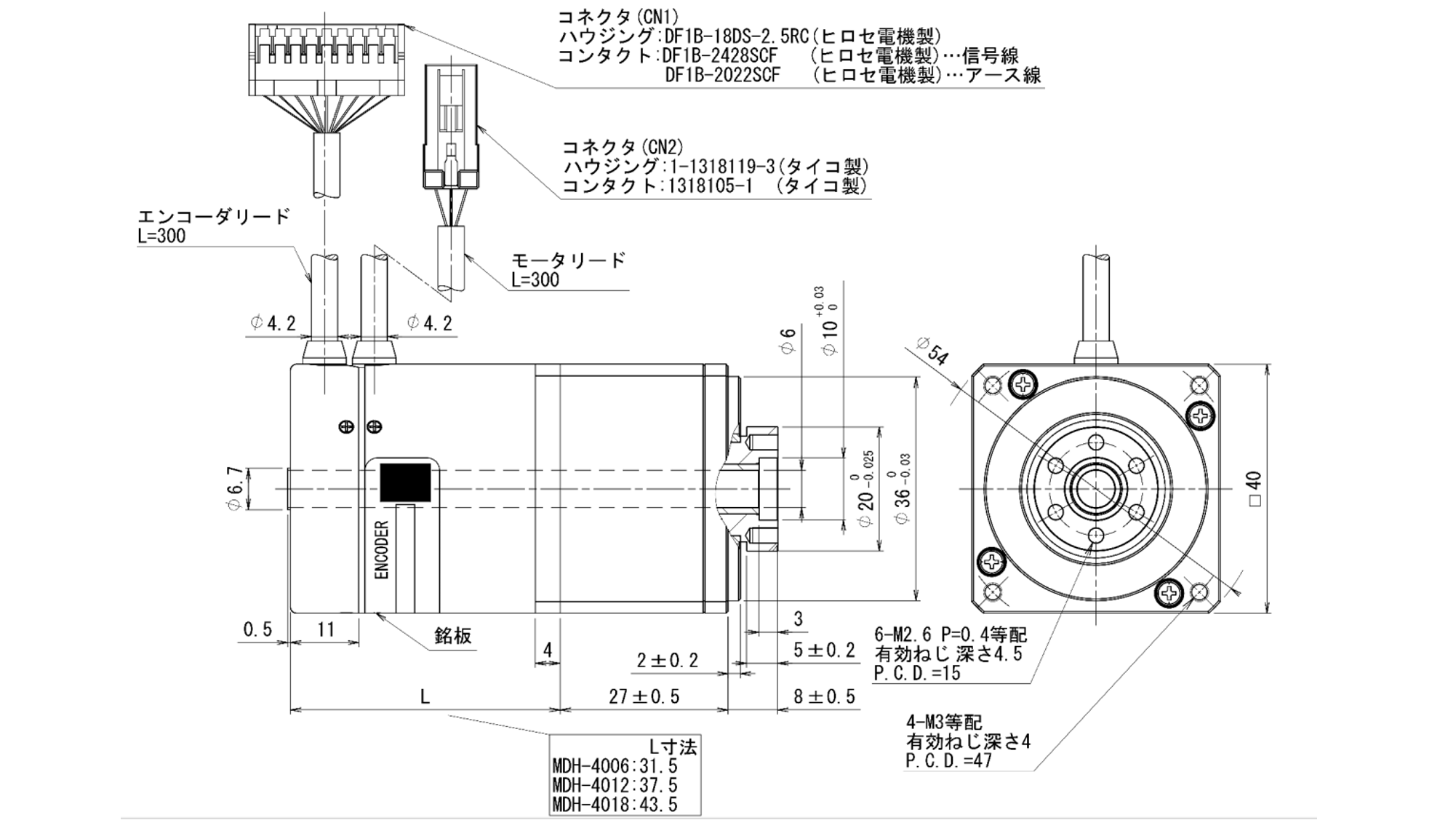
Achieve high torque and reverse drive performance. Perfect for finger joints and wrist/elbow joints of robotic hands. Body diameter:□40mm