| Motor Part Number | PSM2-20系列 | PSM2-28系列 | PSM2-42系列 | PSM2-56系列 | PSM2-60系列 |
|---|---|---|---|---|---|
| 驅動器型號 | PSD2-EC-20系列 | PSD2-EC-28系列 | PSD2-EC-42系列 | PSD2-EC-56系列 | PSD2-EC-60系列 |
| 輸入電壓 | 24VDC ±10% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 控制方式 | ARM-based 32位MCU閉迴路控制 | ||||||||||
| 功耗 | 500mA Max(不包括馬達電流和煞車電流(使用煞車時)) | ||||||||||
| Environmental conditions | 溫度 | 使用環境溫度:0~50℃(無結露) 保存環境溫度:-20~70℃(無結露) |
|||||||||
| 濕度 | 工作環境濕度:35 至 85% RH(無結露) 保存環境濕度:10 至 90% RH(無結露) |
||||||||||
| 振動 | 0.5G | ||||||||||
| 安規 | CE : EN61800-3:2004/A1:2012(EnvironmentⅡC3) RoHS : 2011/65/EU |
||||||||||
| 功能 | 轉速 | 0-3,000rpm | |||||||||
| Encoder resolution |
|
||||||||||
| 保護功能 (警報輸出) |
過電流、過速度、位置跟隨、過載、過熱、回生電壓、馬達連接、編碼器連接、主電源電壓、 定位完成、ROM、定位誤差超出、轉矩關閉電路 注:錯誤代碼(603Fh)和錯誤代碼表請參考手冊 |
||||||||||
| LED顯示屏 | 電源、定位完成、勵磁ON狀態、報警 | ||||||||||
| 以太貓 | 支持 通訊協議 |
CoE(基於 EtherCAT 的 CANopen 應用協議)、 FoE(基於 EtherCAT 的文件訪問) |
|||||||||
| 對應資料 | CiA402 驅動配置文件 | ||||||||||
| 動作模式 | 循環同步位置模式(Cyclic Synchronous Position Mode)、 *1 位置模式(Profile Position Mode)、原點復歸模式(Homing Mode) |
||||||||||
| 同步模式 | Free Run, SM Event, DC SYNC Event(250 µs 以上) | ||||||||||
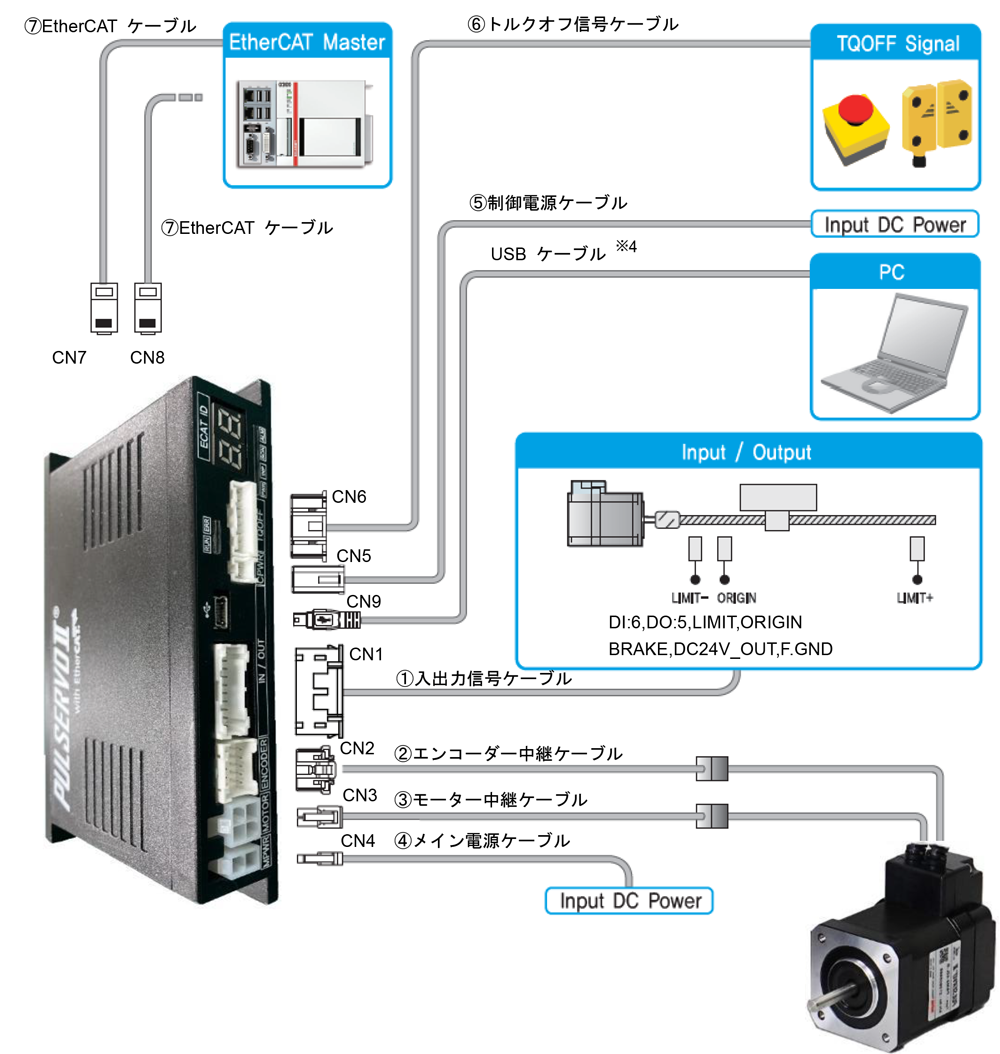
| 輸入/輸出 信號 |
輸入信號功能 | 正負極限輸入、原點輸入、轉矩關閉輸入、 6個通用輸入信號 I/F:光電耦合器輸入 |
|||||||||
| 輸出信號功能 | 轉矩斷開狀態輸出、煞車輸出、5個通用輸出信號 I/F:光電耦合器輸出 |
||||||||||
*Click the picture to zoom in.
*Click the picture to zoom in.
| 腳位 | 功能 | 輸入輸出 |
|---|---|---|
| 1 | +Limit | 輸入 |
| 2 | -Limit | 輸入 |
| 3 | Origin | 輸入 |
| 4 | DI 1 | 輸入 |
| 5 | DI 2 | 輸入 |
| 6 | DI 3 | 輸入 |
| 7 | DI 4 | 輸入 |
| 8 | DI 5 | 輸入 |
| 9 | DI 6 | 輸入 |
| 10 | DO 1 | 輸出 |
| 11 | DO 2 | 輸出 |
| 12 | DO 3 | 輸出 |
| 13 | DO 4 | 輸出 |
| 14 | DO 5 | 輸出 |
| 15 | Brake+※ | 輸出 |
| 16 | Brake-※ | 輸出 |
| 17 | 24GND(EXT) | 輸入 |
| 18 | 24V(EXT) | 輸入 |
| 19 | FGND | – |
| 20 | FGND | – |
*煞車選配