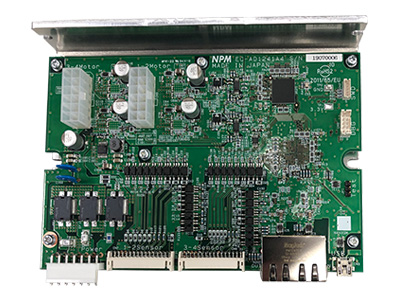



EtherCAT(EC-AD1241A4)的三大特點
1. 兼容CiA402
EtherCAT 設備必須支持 CiA402(IEC 61800-7-201 和 IEC 61800-7-301 中定義的驅動器和運動控制設備配置文件)。
所有對像都放置在從 0000h 到 FFFFh 的區域中並進行分組。
(1) 0000h ~ 0FFFh 數據類型區域
(2) 1000h ~ 1FFFh CoE 通信區域(CoE:基於 EtherCAT 的 CAN 應用協議)
(3) 2000h ~ 5FFFh 製造商特定區域
(4) 6000h ~ 9FFFh 配置文件區域
(5) AFFFh ~ FFFFh保留
(2)CoE通信區域主要進行獲取設備信息和通信所需的定義,而(3)
製造商特定區域配置製造商定義的運動控制環境設置並獲取狀態。我會的。
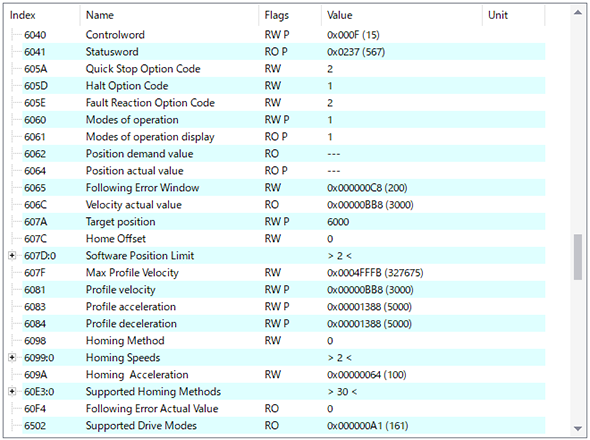
在配置文件區域 (4) 中,讀寫將實際執行的命令和信息。配置文件區域中的主要項目如下。
例如,X軸:
6040h “Controlword”:控制從站的運行開始、停止等。
6041h“Statusword”:獲取從站狀態。
6060h“操作模式”:設置操作模式。
6064h“位置實際值”:獲取當前位置。
607Ah“目標位置”:設置目標位置。
6081h“Profilevelocity”:設置移動速度。
有很多這樣的對象可用。(見下圖)
2、實時通訊方式
從主站開始的 EtherCAT 幀在一個週期內按照連接順序經過網絡上的所有從站,並且 EtherCAT 幀在經過的同時通過即時處理進行更新,因此所有從站的周期數據每更新一次循環。
此外,EtherCAT採用全雙工通信方式,因此發送和接收是同時發生的。
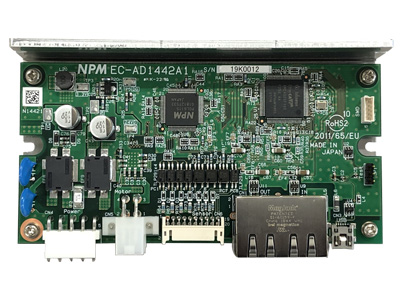
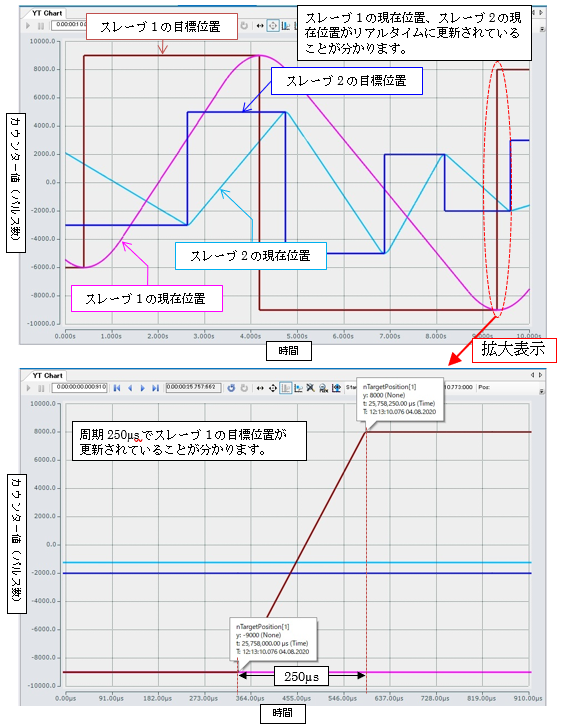
下圖顯示了IPC (TwinCAT) – EC-AD1442A1 (Slave 1) – EC-AD1241A4 (Slave 2)的配置,在Profile Position模式下操作時以圖形方式顯示目標位置和當前位置,這是一個示意圖。
對於Master來說,目標位置是發送,當前位置是接收,但是可以看到兩者都是實時更新的。
另外,在目標位置更新部分的放大圖中,可以看到目標位置以一個週期(250 µs)更新。
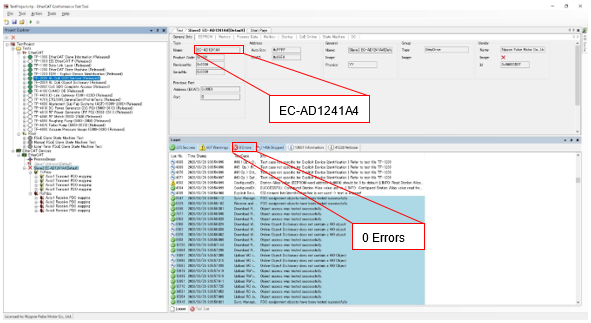
3、一致性測試
一致性測試是確認EtherCAT產品符合協議規範的測試。
EtherCAT產品可能會連接到多個製造商銷售的產品,例如其他公司的主站和其他公司的從站,因此在開始銷售之前檢查協議規範的一致性至關重要。
為了確認其適用性,必須使用一致性測試工具進行測試,並且錯誤數必須為零。
我們的EC-AD1241A4也使用一致性測試工具進行了測試,如下圖所示,錯誤數為0,證實了其適用性。